
免费咨询热线
0571-852787786
0571-852787786

YYVIP易游技术文档
ARTICLES 当前位置: 首页 > YYVIP易游技术文档
当前位置: 首页 > YYVIP易游技术文档
 更新时间:2026-01-09
更新时间:2026-01-09 点击次数:
点击次数:
YYVIP易游·(中国有限公司)官方网站拿到一个IMU,首要任务是对其器件误差进行分析,这包括陀螺仪的误差和加速度计的误差。其实这两者的误差分析基本类似,
所以我们就以陀螺仪为准来介绍误差成分、原理及分析方法。加速度计的误差分析直接照葫芦画瓢就行。
量化噪声是数字传感器必然出现的噪声,我们通过AD采集把连续时间信号采集成离散信号,在这个过程中,精度就会损失,
陀螺敏感角速率输出时是有噪声的,这个噪声里面的白噪声成分叫宽带角速率白噪声,我们计算姿态时,本质上是对角速率做积分,
这必然会对噪声也做了积分。白噪声的积分并不是白噪声,而是一个马尔可夫过程,即这一次的误差是在上一次误差的基础上累加一个随机白噪声得到的;
从理解上和角度随机游走一样,角速率里面并不全是白噪声,它也有马尔可夫性质的误差成分,而这个误差是由宽带角加速率白噪声累积的结果。
这应该是大家再熟悉不过的一个误差项了,如果一个陀螺只让你用一个指标来体现精度,那必然就是它了。但是这个指标的理解上却不像前几个参数那样直白。
我们可以先把它理解为零偏随时间的缓慢变化,假设在刚开始时零偏大小是某个值,那么过一段时间之后,零偏便发生了变化,
具体变化成了多少,无法预估,所以就要给他一个概率区间,来描述它有多大的可能性落在这个区间内,时间越长,区间越大。
实际上,如果你真的测的时间足够长,会发现它也不会无限制增长下去,所以,这个对概率区间的描述只是近似有效,或者一定时间内有效,
由于这个有效时间比较长,所以我们一般仍然使用这种方式来描述,只是在理解上要知道这一点的存在。
看到斜坡这种描述词,我们一般会想它是不是一种趋势项。实际上,它确实是趋势性误差,而不是随机误差。所谓随机误差,
是指你无法用确定性模型去拟合并消除它,最多只能用概率模型去描述它,这样得到的预测结果也是概率性质的。而趋势性误差是可以直接拟合消除的,
这应该是当前最常用的误差分析方法了,我们得到的数据都是各种误差混合在一起的,这种方法能够把各种混合误差很好地分离出来,使之不会互相影响。
比如,有的陀螺温度特性比较好,有的比较差,用别的方法可能分析出的误差会因此产生很大的区别,而用Allan方差,则能够把温变误差隔离开,
具体原理就是,把数据按一定时间区间分成多段,常见的分段区间长度是100s一段,每段计算出一个均值,然后所有段的均值计算出一个方差,
就作为陀螺的精度指标了。这种方法实际是在Allan方差方法出现之前所使用的,而且之所以出现Allan方差,就是因为这种方法统计的结果不准,
才被迫另寻高招。按照上面介绍的各种随机误差原理,我们能看到,这种方法统计出来的结果,必然是统计时间越长,指标越差。
而且冷启动和热启动结果也不一样,因为有温度漂移误差在里面。所以这种方法本应被淘汰的,之所以还有些在用,多数是以前的流程里沿用下来的,变成历史遗留问题了。
由于不同方法统计出的结果不一样,所以我们在比较器件精度的时候,一定要确认好他们是否是同一种方法统计出来的。另外需要注意的是,
在直接方差统计方法中,区间分段时间(也就是上面说的100s)不同时,统计的结果也会不同,区间段越长,精度越好。所以不仅要确认方法相同,
还要确认参数相同,有的告诉别人说自己是直接方差统计方法,却不说自己使用的是1000s分段,这就是典型的耍流氓了。
我们都知道,计算Allan方差,是通过拟合方差随时间间隔变化的双对数曲线来实现的。所以,我们所计算的Allan方差,其实是一个系数,它体现了方差和时间间隔之间的关系。
上面我们介绍了五种误差,所以就存在五种关系,这里我们直接给出结果公式,推导过程可参考西工大严恭敏老师的《惯性仪器测试与数据分析》。
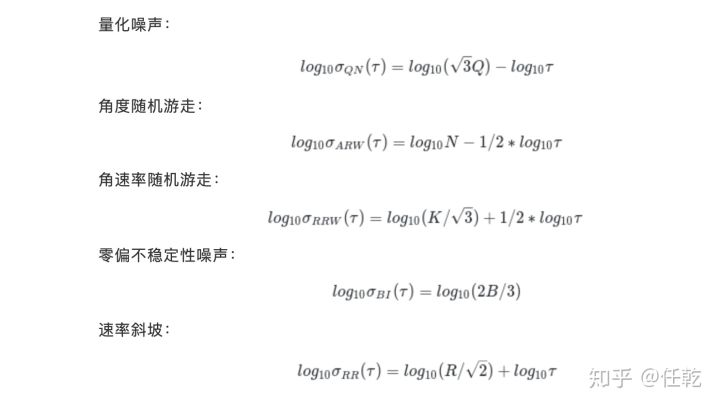
如果我们把这五条曲线画在一张图上,会看到下面的图形。(图太丑,凑合看吧)
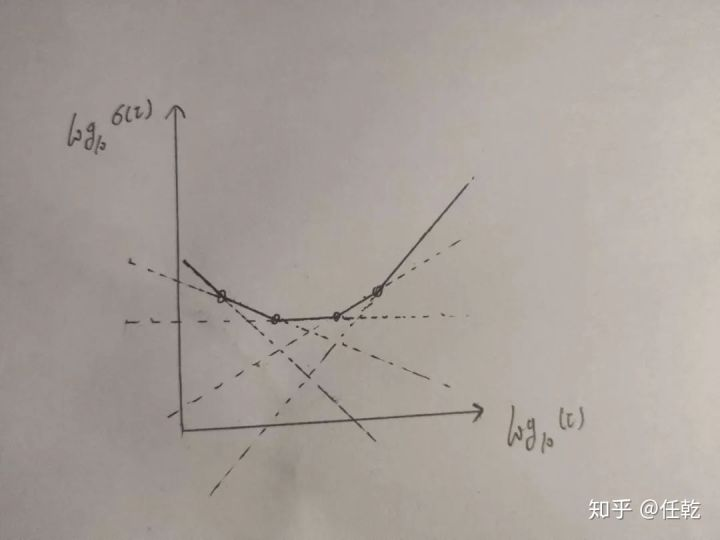
五种误差对应了五条虚线,实际数据是五条虚线的叠加。而我们用实际数据测出来的方差曲线往往对应的都是图中实线的形状,
之所以会这样是因为这是双对数坐标,在这样的坐标系下,纵轴上半部分的值是比下半部分的值大很多的,所以累加之后就只上下上半部分对应的形状了。
需要注意的是,实际数据分析曲线中,不一定能完整体现出这全部的五种误差,如果有某一项比较小,就可能被其他误差所淹没。
反之,如果某一项特别大,则可能把其他几项全部淹没。理想形状出现的概率并不是很高,不必过于纠结。
误差分析 如果上一章中的分类器是一个真实的项目,则我们最好是要遵循机器学习项目步骤:探索数据、准备数据、尝试多个模型、列出表现最好的几个模型、使用GridSearchCV对超参数进行调优、尽可能实现自动化。现在,假设我们已经有了一个性能还不错的模型,接下来我们要找一些办法去优化、提升它。其中一个办法是就分析这个模型产生的各种不同类型的误差、差错。 首先我们看一下混淆矩阵,我们需要先使用cross_...
MPU6050模块,如图 1所示。该模块集成了一片MPU6050芯片和一片STM8S003F3P6单片机,具有串口和I2C接口。MPU6050中的DMP(数字运动处理器)对姿态进行融合,STM8单片机通过IIC读取DMP的处理结果,再添加上包头串行输出三轴加速度、三轴角速度、三轴角度和温度数据,输出频率为100Hz。 MPU6050芯片内部由四部分组成:加速度计、陀螺仪、DMP(Dig...
惯性导航(IMU)误差分析 一、姿态误差分析 1.写出不考虑误差时的微分方程 2.写出考虑误差时的微分方程 3.写出真实值与理想值之间的关系 (1)姿态误差的引入 (2)imu角速度误差的引入 (3)关联误差的引入 4.把真实值与理想值之间的关系,带入误差时的微分方程 5.把第一步中不考虑误差时的微分方程带入第四步方程 6.简化方程 二、速度误差分析 三、位置误差分析 一、姿态误差分析 1.写出不...
欠拟合/过拟合在这里叫做偏差/方差权衡 一般的,欠拟合指假设函数不能较好的拟合样本数据,比如实际样本数据是二次函数,用一次函数无论如何都不能很好地拟合。或者可以理解为,无论样本多么充足,函数依然不能学习到真实问题的结构。 过拟合指假设函数过于复杂,挖掘出了有限个样本数据中的某些奇怪的,实际并不存在特征联系,导致在样本集上误差很低,但泛化误差(非样本数据上)却很高。 定义偏差bias为即使训练集很大...
拉格朗日插值法 在数值分析复习(一)线性插值、抛物线插值中我们讨论过线性插值与二次插值,其实都是接下来要讲的拉格朗日插值的特殊情况,接下来我们一一分析: 定义插值基函数: 若n次多项式在n+1个节点上满足条件: 就称这n+1个n次多项式为节点上的n次插值基函数。 引入记号: 拉格朗日插值多项式可变换为: 当n=1时,,为线时,,展开后可得抛物线插值 注:n次插值多项式...
我们知道,单精度浮点数运算时会产生误差,但是误差具体是如何产生的?本篇博文将详细分析float浮点数在运算时产生误差的原因,我们首先通过一段C代码来进行浮点运算 C代码 输入种子数1和数组大小n,得到3种方式进行浮点数累加运算的结果 从0-29进行累加,可以看到在进行s=511.9999...
本文讲的是 : 动静结合 APT防护需建立整体应对体系 , 【IT168评论】刚刚过去的2014年是信息安全形势极为复杂的一年,大量影响到我们切身生活的信息安全事件频繁出现,尤其是各种APT攻击事件趋于爆发式增长,传统的安全威胁方式已经渐渐消失,具有持续性、针对性和隐蔽性的新一代网络安全威胁日趋常态化,越来越多的出现在我们的周...
前言 本文的主要作用是说明如何将Windows 7 定制成嵌入式风格的系统,去除Windows的所有特征,开机进入自定义软件。 1、去除开机界面 开始-运行-输入msconfig-引导-勾选“无GUI引导” 2、关闭系统音效 ①桌面右下角声音图标右键 ②选择“声音” ③将声音方案设置为“无声” ...

 服务热线
服务热线 浙江省杭州市拱墅区环城北路165号汇金国际大厦
浙江省杭州市拱墅区环城北路165号汇金国际大厦 laicailaicai@163.com
laicailaicai@163.com